Configuración
Esta ventana permite configurar el sistema de Lazo Cerrado.
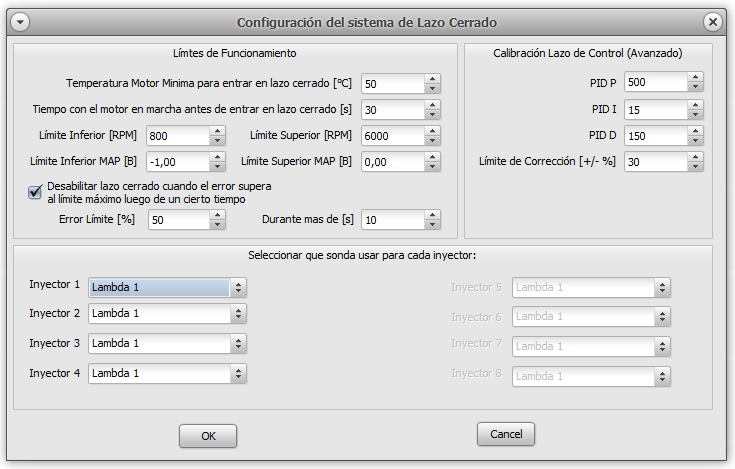
La configuración se divide en tres secciones principales:
Límites de Funcionamiento
En esta sección se definen los rangos en los que el motor habilita el lazo cerrado.
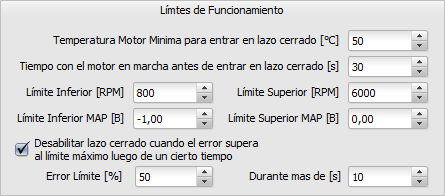
- Temperatura mínima del motor para activar el lazo cerrado (°C): Especifica la temperatura mínima a la que el sistema pasa de lazo abierto a lazo cerrado.
- Tiempo mínimo con el motor en marcha antes de activar el lazo cerrado (s): Indica el tiempo que el motor debe estar funcionando antes de habilitar el lazo cerrado. Es útil para esperar el calentamiento y calibración del controlador de banda ancha.
- Límite inferior y superior de RPM: Define el rango de velocidad del motor en el que el lazo cerrado permanece activo. Fuera de este rango, el sistema opera en lazo abierto.
- Límite inferior y superior de MAP (B): Establece el rango de presión en el colector de admisión (MAP) en bares. El lazo cerrado se activa dentro de este rango.
- Deshabilitar lazo cerrado por error excesivo: Si el controlador de la sonda se desconecta o el sensor de escape falla, la información de la relación aire-combustible puede ser incorrecta. Esto podría provocar correcciones extremas que dañen el motor. Esta función permite definir un límite de error y un tiempo máximo para que, si ambos se superan, el sistema pase a lazo abierto.
- Error límite (%): Porcentaje máximo de error permitido antes de desactivar el lazo cerrado.
- Durante más de (s): Tiempo máximo en segundos que se tolera el error antes de la desactivación.
Calibración del Lazo de Control (Avanzado)
Aquí se configuran los parámetros del lazo de control de realimentación, que funciona como un controlador Proporcional-Integral-Derivativo (PID) con límite de corrección.
Los valores de fábrica han sido probados en varios vehículos y suelen ser adecuados, pero pueden ajustarse para mejorar la respuesta o atenuar la compensación según las necesidades del motor.
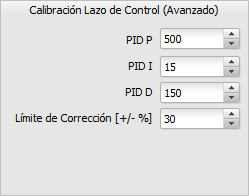
- PID P: Ajusta la corrección proporcional al error instantáneo. Un valor mayor implica una corrección más rápida.
- PID I: Corrige el error acumulado a lo largo del tiempo. Un valor mayor aumenta el impacto sobre el error acumulado.
- PID D: Anticipa cambios en el error para estabilizar el sistema. Un valor mayor proporciona mayor amortiguación.
- Límite de corrección (±%): Establece el rango máximo de corrección permitido, en porcentaje.
Tip
Coloque el motor en un régimen estable y observe la lectura de la sonda. Si la lectura es constante pero distante del objetivo, aumente PID P y/o PID I. Si la lectura oscila alrededor del objetivo, reduzca PID P y/o PID I, o aumente PID D para estabilizar la corrección.
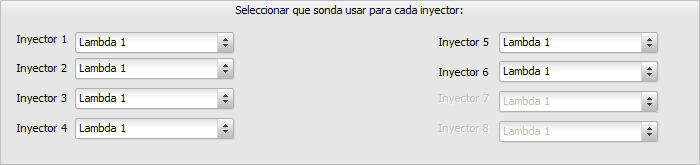
Selección de Sondas para Cada Inyector
En esta sección se selecciona la sonda utilizada para la realimentación de cada inyector. Es especialmente útil en motores en V, donde se suelen instalar dos sondas, una por cada banco.