Avanzado: Filtros.
Nota
Esta ventana contiene parte de la configuración avanzada, cuyos cambios deben realizarse con mucha atención
Los filtros son herramientas que nos permiten ajustar el tiempo que se toma la ECU para validar una medición. Como podemos ver en la configuración por defecto en la imagen siguiente, los primeros 10, correspondientes a señales analógicas, se miden en ms (milisegundos), mientras que las señales pulsantes (sensores de velocidad) se miden en pulsos de promediación.
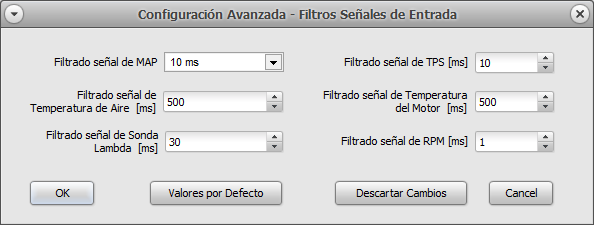
Cuanto más cortos (menor tiempo en ms o en cantidad de pulsos) configuramos los filtros, más rápido se actualiza la variable; esto mejora la respuesta pero expone a que rebotes eléctricos, ruido del sensor o pulsaciones propias del motor se traduzcan en oscilaciones de mezcla, avance u otros cálculos. Al alargar el tiempo del filtro se estabiliza la señal (promedia / amortigua), a costa de introducir retardo y posible sensación de pereza en transitorios. El objetivo para un preparador es encontrar el punto mínimo de filtrado que todavía entregue una señal suficientemente limpia para que las correcciones y estrategias no “persigan” el ruido.
Casos especiales para el MAP (sincronización con el motor)
Además del filtrado por tiempo, puede seleccionarse cómo consolidar los valores del MAP dentro de uno o dos giros del motor. Esto es crítico en motores con pulsaciones marcadas (múltiples mariposas, levas con mucho cruce, colectores cortos) donde la forma de la onda de presión varía mucho dentro de la vuelta.
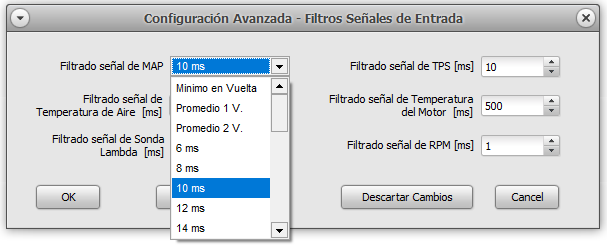
Opciones:
- Mínimo en vuelta: La ECU toma todas las lecturas de MAP durante una vuelta y usa el valor más bajo (mayor vacío) para todos los cálculos de esa vuelta. Útil cuando las crestas (picos de presión) son artefactos de resonancia y se desea una referencia de carga estable basada en el “vacío real” mínimo. Mejora estabilidad de ralentí en motores con pulsaciones fuertes, pero puede subestimar la carga en transitorios rápidos.
- Promedio 1 V: Promedia todas las lecturas en una vuelta. Equilibrio entre rapidez y estabilidad. Recomendado como punto de partida general: suaviza picos aislados sin atrasar demasiado la señal.
- Promedio 2 V: Promedia lecturas a lo largo de dos vueltas. Máxima suavización dentro de estas opciones; útil solo cuando el MAP oscila tanto que ni el promedio de 1 vuelta resulta estable (ralentí extremo, vibración).
Guía práctica:
- Comenzar con Promedio 1 V y un tiempo de filtro moderado.
- Si el valor MAP “tiembla” y genera variaciones visibles en tiempos de inyección o avance, primero aumentar ligeramente el tiempo del filtro.
- Si aún es inestable por pulsaciones cíclicas, evaluar Mínimo en vuelta (para estabilizar el punto de carga) o, si la señal sigue errática, Promedio 2 V.
- Verificar después los transitorios: si se percibe retardo en respuesta de mezcla al abrir mariposa, reducir algo el tiempo de filtro antes de cambiar el modo de promediado.
Siempre ajustar con motor a temperatura de operación y monitorear tiempos de inyección y avance para confirmar que la estabilización del MAP mejora (y no empeora) el control global.